Nikan
Nikan Dilated Convolution, Mask RCNN and Number of Parameters
This post consists of:
- Answer below questions:
- What is Dilated Convolution?
- What are use cases?
- What are Pros and Cons?
- Mask R-CNN:
- Report a summary of Mask R-CNN paper.
- Use any implemented model(pretrained) on your custom input
- Compute number of parameters in each layer for below network:
model = get_unet((256, 256, 3))
def conv2d_block(input_tensor, n_filters, kernel_size=3):
# first layer
x=Conv2D(filters=n_filters, kernel_size=(kernel_size, kernel_size),
padding='same')(input_tensor)
x=Activation('relu')(x)
# second layer
x=Conv2D(filters=n_filters, kernel_size=(kernel_size, kernel_size),
padding='same')(input_tensor)
x=Activation('relu')(x)
return x
def get_unet(input_img, n_filters=16):
# Contracting Path
c1=conv2d_block(input_img, n_filters*1, kernel_size=3)
p1=MaxPooling2D((2, 2))(c1)
c2=conv2d_block(p1, n_filters*2, kernel_size=3)
p2=MaxPooling2D((2, 2))(c2)
c3=conv2d_block(p2, n_filters*4, kernel_size=3)
p3=MaxPooling2D((2, 2))(c3)
c4=conv2d_block(p3, n_filters*8, kernel_size=3)
p4=MaxPooling2D((2, 2))(c4)
c5=conv2d_block(p4, n_filters=n_filters*16, kernel_size=3)
# Expansive Path
u6=Conv2DTranspose(n_filters*8, (3, 3), strides=(2, 2), padding='same')(c5)
u6=concatenate([u6, c4])
c6=conv2d_block(u6, n_filters*8, kernel_size=3)
u7=Conv2DTranspose(n_filters*4, (3, 3), strides=(2, 2), padding='same')(c6)
u7=concatenate([u7, c3])
c7=conv2d_block(u7, n_filters*4, kernel_size=3)
u8=Conv2DTranspose(n_filters*2, (3, 3), strides=(2, 2), padding='same')(c7)
u8=concatenate([u8, c2])
c8=conv2d_block(u8, n_filters*2, kernel_size=3)
u9=Conv2DTranspose(n_filters*1, (3, 3), strides=(2, 2), padding='same')(c8)
u9=concatenate([u9, c1])
c9=conv2d_block(u9, n_filters*1, kernel_size=3)
outputs=Conv2D(10, (1, 1), activation='sigmoid')(c9)
model=Model(inputs=[input_img], outputs=[outputs])
return model
1 Answer below questions:
- What is Dilated Convolution?
- What are use cases?
- What are Pros and Cons?
1.A Dilated Convolution
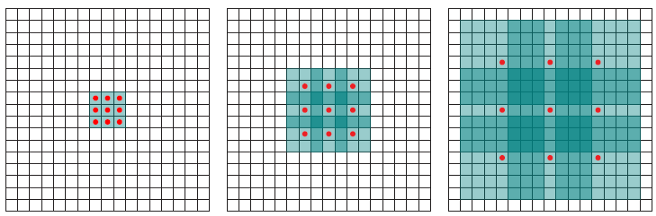
First of of let depict the whole idea simply by comparing the dilated convolution math formula and standard conv formula.

As we can see hyper parameter has been added which is l where corresponds to number of steps per addition in long-run convolution. If we set l=0, then we have normal convolution. This parameter l will skip some points in neighborhood.
Here is how it works:
Dilated convolution incorporates larger receptive field regarding same amount of parameters of windows size, etc regarding normal conv.
1.B Use cases
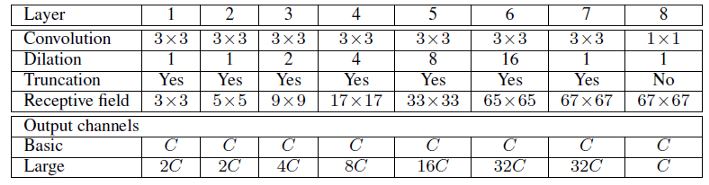
In the paper Multi-scale context aggregation by dilated convolutions authors have shown that almost any model on semantic segmentation task can perform better by adding a context layer which is constructed of multiple different conv layers with different size of l to introduce bigger receptive field over layers.
The reason is as we know in semantic segmentation of similar tasks, we need to consider different object sizes when labeling pixels, so by having normal conv (l=1) and adding dilated convs (l>=2), the receptive field has been increased so labeling can be done wiser.
Here is the definition of context module in the aforementioned paper:
1.C Pros and Cons
About pros, in summary we can say dilation does not change number of parameters or calculations, so there is no memory of time disadvantage about this operation but as this approach provides larger receptive fields regarding same amount of operations, it outperforms must of the base models. Also, it dilation factor can be increased while preserving resolution. All this aspects caused to have better results in semantic segmentation tasks.
But about cons, using dilation in models such as ResNet where this models try to preserve learned features in previous layers, can cause producing artifacts like chess board or dot effect in image-to-image translation tasks. Although this problem has solved by adding skip-connections to some particular points, not all x-step convs.
2 Mask R-CNN:
- Report a summary of Mask R-CNN paper.
- Use any implemented model(pretrained) on your custom input
2.A Mask R-CNN
Let’s say firstly we know what is object detection, semantic segmentation and instance segmentation. (See here if not)
Also let’s say we know what R-CNN, Fast R-CNN and Faster R-CNN models are. (See here if not)
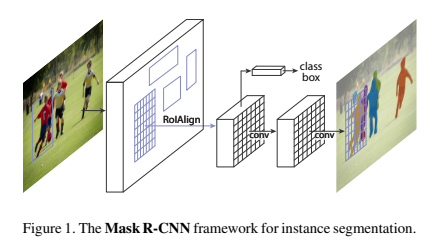
Mask R-CNN is a model for instance segmentation task. This model generate 3 outputs :
- Object label
- Bounding box
- Object mask
About all previous models with R-CNN architecture, third output has been provided and actually the major importance of Mask R-CNN model because third output.
Now let’s have a brief understanding of model before going into more details.
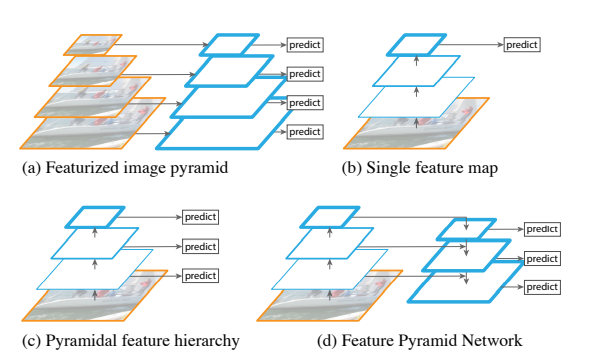
Mask R-CNN has been constructed by two stages, first stage’s duty is to generate region proposals but using completely different approach from previously proposed papers. Secondly, it generates object labels, refine bounding boxes and masks pixel-wise based on the region proposal from first stage. These both stages obtained from a base CNN model based on Feature Pyramid Network style.
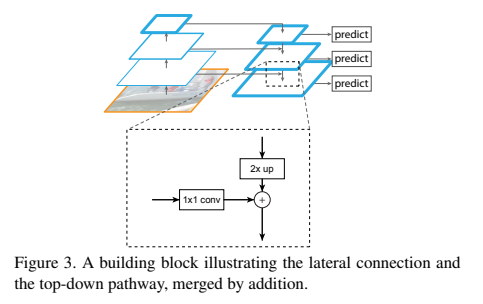
FPN is U-net structure where in contracting phase any model like ResNet101 can be used. There is a expansion phase too which is similar to contracting phase but reverse in size where the output of each step in contracting phase has been concatenated to the output of corresponding layer in expansion phase. Here is image from FPN paper:
Now let’s talk about first stage. A small CNN model called RPN (region proposal network) will extract region candidate where objects may exists. This model uses the output of expansion phase of FPN model as input as these inputs are extracted features from input images given to the whole network. (This step is identical to Faster R-CNN model)
But for second stage, Mask R-CNN generates a binary mask for each RoI while predicting object labels and their bounding boxes still is identical to faster r-cnn and have been done simultaneously.
The loss function also has been expanded to consider mask loss using weighted sum (for each RoI):

Where loss bounding box and label are identical to faster rcnn.
The mask branch of network has Km^2 output where consists of K layer with size of m*m where K is number of classes. So loss mask defines in the way that first apply per-pixel sigmoid then average binary cross-entropy.
Mask representation are small vectors which have been obtained from fully connected layers. The structure of spatial features of masks can be gained by pixel-to-pixel measurements. So to do this, authors generate m*m masks for each RoI using an FCN. But features from different RoIs need to be well aligned to be correctly measured using pixel-to-pixel approach and that’s why RoIAlign has been introduced.
RoIAlgin is operation to extract a small feature map from a RoI. But how it works:
- Use RoIPool to quantize a floating-point RoI into discrete form (
round(x/16)) - Divine output into different spatial bins where all are quantized too
- Aggregate feature values covered by each bin using MaxPool
This approach introduces misaligned bins for different RoIs so to handle this harsh quantization, RoIAlgin layer has been used. To solve this issue here is the new approach:
- Use
x/16(no rounding) to quantize - Consider four bins for each RoI
- Fill missed values using bilinear interpolation
- Aggregate feature values using MaxPool or AvgPool
And about network architecture, three term can represent it:
- Backbone where can be any FPN network or VGG style used for feature extraction
- Head network for bounding box prediction and mask generation where applied separately where can be any fully convolutional network like a part of ResNet, etc.
2.B Mask R-CNN Inference
!git clone https://github.com/matterport/Mask_RCNN.git
cd Mask_RCNN/
/content/Mask_RCNN
import os
import sys
import random
import math
import numpy as np
import skimage.io
import matplotlib
import matplotlib.pyplot as plt
%matplotlib inline
%tensorflow_version 1.x
from mrcnn import utils
import mrcnn.model as modellib
from mrcnn import visualize
from samples.coco import coco
MODEL_DIR = 'mask_rcnn_coco.h5'
if not os.path.exists(MODEL_DIR):
utils.download_trained_weights(MODEL_DIR)
class InferenceConfig(coco.CocoConfig):
GPU_COUNT = 1
IMAGES_PER_GPU = 1
config = InferenceConfig()
config.display()
Configurations:
BACKBONE resnet101
BACKBONE_STRIDES [4, 8, 16, 32, 64]
BATCH_SIZE 1
BBOX_STD_DEV [0.1 0.1 0.2 0.2]
COMPUTE_BACKBONE_SHAPE None
DETECTION_MAX_INSTANCES 100
DETECTION_MIN_CONFIDENCE 0.7
DETECTION_NMS_THRESHOLD 0.3
FPN_CLASSIF_FC_LAYERS_SIZE 1024
GPU_COUNT 1
GRADIENT_CLIP_NORM 5.0
IMAGES_PER_GPU 1
IMAGE_CHANNEL_COUNT 3
IMAGE_MAX_DIM 1024
IMAGE_META_SIZE 93
IMAGE_MIN_DIM 800
IMAGE_MIN_SCALE 0
IMAGE_RESIZE_MODE square
IMAGE_SHAPE [1024 1024 3]
LEARNING_MOMENTUM 0.9
LEARNING_RATE 0.001
LOSS_WEIGHTS {'rpn_class_loss': 1.0, 'rpn_bbox_loss': 1.0, 'mrcnn_class_loss': 1.0, 'mrcnn_bbox_loss': 1.0, 'mrcnn_mask_loss': 1.0}
MASK_POOL_SIZE 14
MASK_SHAPE [28, 28]
MAX_GT_INSTANCES 100
MEAN_PIXEL [123.7 116.8 103.9]
MINI_MASK_SHAPE (56, 56)
NAME coco
NUM_CLASSES 81
POOL_SIZE 7
POST_NMS_ROIS_INFERENCE 1000
POST_NMS_ROIS_TRAINING 2000
PRE_NMS_LIMIT 6000
ROI_POSITIVE_RATIO 0.33
RPN_ANCHOR_RATIOS [0.5, 1, 2]
RPN_ANCHOR_SCALES (32, 64, 128, 256, 512)
RPN_ANCHOR_STRIDE 1
RPN_BBOX_STD_DEV [0.1 0.1 0.2 0.2]
RPN_NMS_THRESHOLD 0.7
RPN_TRAIN_ANCHORS_PER_IMAGE 256
STEPS_PER_EPOCH 1000
TOP_DOWN_PYRAMID_SIZE 256
TRAIN_BN False
TRAIN_ROIS_PER_IMAGE 200
USE_MINI_MASK True
USE_RPN_ROIS True
VALIDATION_STEPS 50
WEIGHT_DECAY 0.0001
model = modellib.MaskRCNN(mode="inference", model_dir='logs', config=config)
model.load_weights(MODEL_DIR, by_name=True)
file_name = '../conf.jpg'
image = skimage.io.imread(file_name)
plt.imshow(image)
<matplotlib.image.AxesImage at 0x7feb923cc198>

class_names = ['BG', 'person', 'bicycle', 'car', 'motorcycle', 'airplane',
'bus', 'train', 'truck', 'boat', 'traffic light',
'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird',
'cat', 'dog', 'horse', 'sheep', 'cow', 'elephant', 'bear',
'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie',
'suitcase', 'frisbee', 'skis', 'snowboard', 'sports ball',
'kite', 'baseball bat', 'baseball glove', 'skateboard',
'surfboard', 'tennis racket', 'bottle', 'wine glass', 'cup',
'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple',
'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza',
'donut', 'cake', 'chair', 'couch', 'potted plant', 'bed',
'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote',
'keyboard', 'cell phone', 'microwave', 'oven', 'toaster',
'sink', 'refrigerator', 'book', 'clock', 'vase', 'scissors',
'teddy bear', 'hair drier', 'toothbrush']
# Run detection
results = model.detect([image], verbose=1)
# Visualize results
r = results[0]
visualize.display_instances(image, r['rois'], r['masks'], r['class_ids'], class_names, r['scores'])
Processing 1 images
image shape: (852, 1280, 3) min: 0.00000 max: 255.00000 uint8
molded_images shape: (1, 1024, 1024, 3) min: -123.70000 max: 151.10000 float64
image_metas shape: (1, 93) min: 0.00000 max: 1280.00000 float64
anchors shape: (1, 261888, 4) min: -0.35390 max: 1.29134 float32

Note: README: The code has been run on Colab
3 Compute number of parameters in each layer for below network:
model = get_unet((256, 256, 3))
def conv2d_block(input_tensor, n_filters, kernel_size=3):
# first layer
x=Conv2D(filters=n_filters, kernel_size=(kernel_size, kernel_size),
padding='same')(input_tensor) # Block_{changes with 'c' layers}_1
x=Activation('relu')(x)
# second layer
x=Conv2D(filters=n_filters, kernel_size=(kernel_size, kernel_size),
padding='same')(input_tensor) # Block_{changes with 'c' layers}_2
x=Activation('relu')(x)
return x
def get_unet(input_img, n_filters=16):
# Contracting Path
c1=conv2d_block(input_img, n_filters*1, kernel_size=3) # c1
p1=MaxPooling2D((2, 2))(c1)
c2=conv2d_block(p1, n_filters*2, kernel_size=3) # c2
p2=MaxPooling2D((2, 2))(c2)
c3=conv2d_block(p2, n_filters*4, kernel_size=3) # c3
p3=MaxPooling2D((2, 2))(c3)
c4=conv2d_block(p3, n_filters*8, kernel_size=3) # c4
p4=MaxPooling2D((2, 2))(c4)
c5=conv2d_block(p4, n_filters=n_filters*16, kernel_size=3) # c5
# Expansive Path
u6=Conv2DTranspose(n_filters*8, (3, 3), strides=(2, 2), padding='same')(c5) # u6
u6=concatenate([u6, c4])
c6=conv2d_block(u6, n_filters*8, kernel_size=3) # c6
u7=Conv2DTranspose(n_filters*4, (3, 3), strides=(2, 2), padding='same')(c6) # u7
u7=concatenate([u7, c3])
c7=conv2d_block(u7, n_filters*4, kernel_size=3) # c7
u8=Conv2DTranspose(n_filters*2, (3, 3), strides=(2, 2), padding='same')(c7) # u8
u8=concatenate([u8, c2])
c8=conv2d_block(u8, n_filters*2, kernel_size=3) # c8
u9=Conv2DTranspose(n_filters*1, (3, 3), strides=(2, 2), padding='same')(c8) # u9
u9=concatenate([u9, c1])
c9=conv2d_block(u9, n_filters*1, kernel_size=3) #c9
outputs=Conv2D(10, (1, 1), activation='sigmoid')(c9) # outputs
model=Model(inputs=[input_img], outputs=[outputs])
return model
First please the comments above the understand naming convention used in below table of number of paramteres demonstration.
| Layer Name | # Params |
|---|---|
| block_c1_1 | 448 |
| block_c1_2 | 2320 |
| block_c2_1 | 4640 |
| block_c2_2 | 9248 |
| block_c3_1 | 18496 |
| block_c3_2 | 36928 |
| block_c4_1 | 73856 |
| block_c4_2 | 147584 |
| block_c5_1 | 295168 |
| block_c5_2 | 590080 |
| u6 | 295040 |
| block_c6_1 | 295040 |
| block_c6_2 | 147584 |
| u7 | 73792 |
| block_c7_1 | 73792 |
| block_c7_2 | 36928 |
| u8 | 18464 |
| block_c8_1 | 18464 |
| block_c8_2 | 9248 |
| u9 | 4624 |
| block_c9_1 | 4624 |
| block_c9_2 | 2320 |
| outputs | 170 |
 RCNN, Fast RCNN, Faster RCNN and Template Matching [WIP]
RCNN, Fast RCNN, Faster RCNN and Template Matching [WIP]