Nikan
Nikan JPEG, Entropy, Compression Ratio, Huffman and Multiresolution Segmentation
This post consists of:
- Do the following tasks on the given image below:
[[21, 21, 30, 39, 48], [21, 21, 30, 39, 48], [21, 21, 30, 39, 48], [21, 21, 30, 39, 48], [21, 21, 30, 39, 48]]- Calculate entropy
- Compress image using Huffman coding
- Calculate Compression ratio
C - If we intensity differences to code image, calculate entropy
- Here are the steps for this task:
- Create an image using uniform distribution in range of [0, 255] with size of (256, 256)
- Save image using JPG format and report compression ratio and read saved image and report error using RMS metric
- Do step 1 on image where all pixels are
128 - Do step 1 on image where first half (
[:half, :]) is 128 and latter half is0 - Do step 1 on
image2.bmp

- Study JPEG coding and then calculate jpg coding for
image3.bmp. Note that for calculating DCT you can use libraries but other parts need to be handled manually.
- Summarize Multiresolution segmentation algorithm
import numpy as np
import cv2
import matplotlib.pyplot as plt
import os
%matplotlib inline
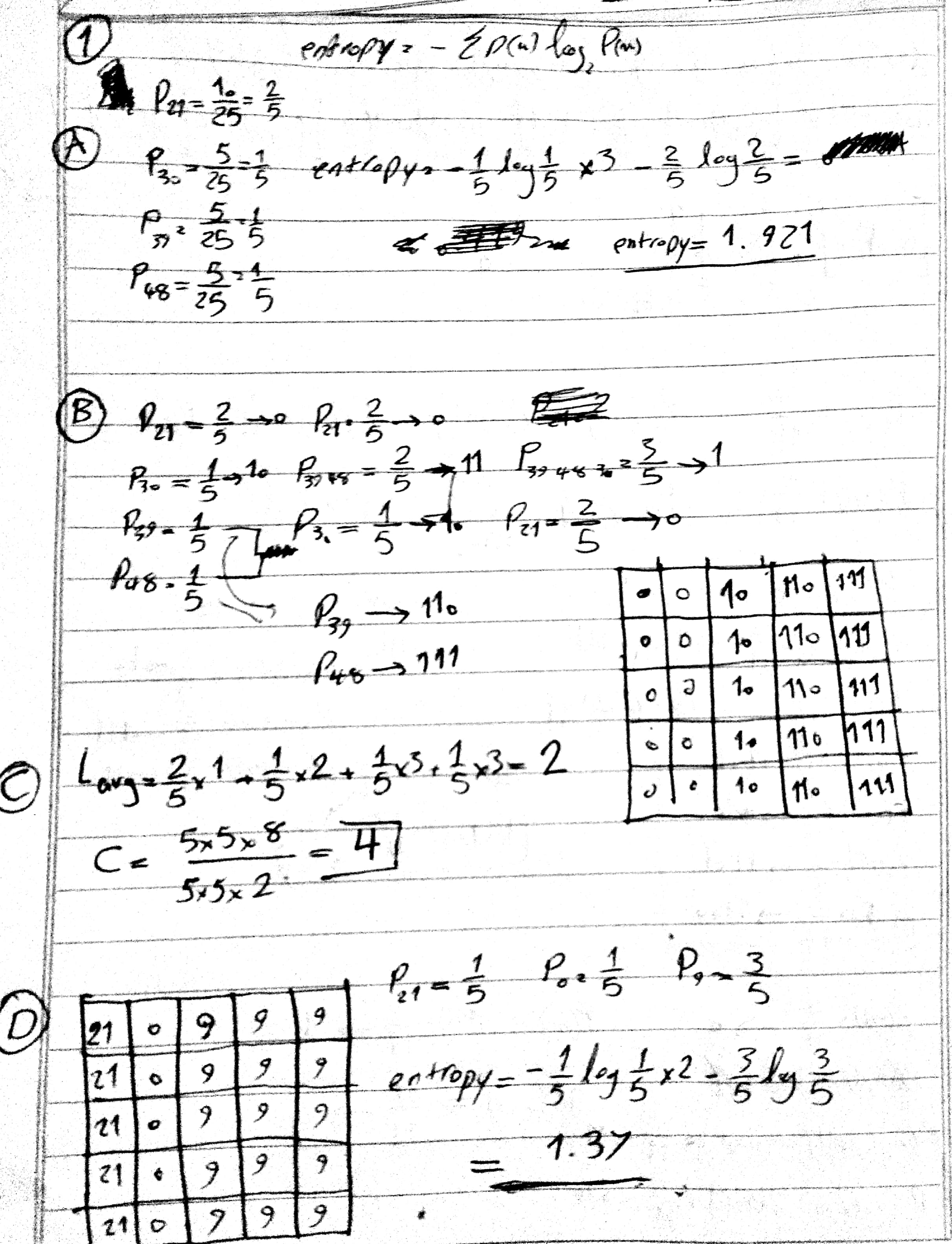
1 Do the following tasks on the given image below:
[[21, 21, 30, 39, 48],
[21, 21, 30, 39, 48],
[21, 21, 30, 39, 48],
[21, 21, 30, 39, 48],
[21, 21, 30, 39, 48]]
- Calculate entropy
- Compress image using Huffman coding
- Calculate Compression ratio
C - If we intensity differences to code image, calculate entropy
2 Here are the steps for this task:
- Create an image using uniform distribution in range of
[0, 255]with size of(256, 256) - Save image using JPG format and report compression ratio and read saved image and report error using RMS metric
- Do step 1 on image where all pixels are
128 - Do step 1 on image where first half (
[half:, :]) is 128 and latter half is0 - Do step 1 on
image2.bmp - Analyze outputs
def rmse(image, compressed):
"""
Calculates the Root Mean Squared Error
:param image: original image in ndarray
:param compressed: compressed image in ndarray
:return: a float rmse value
"""
image = image.flatten()
compressed = compressed.flatten()
return np.sqrt(((compressed - image)**2).mean())
2.A Create an image using uniform distribution
image = np.random.uniform(0, 255, size=(255, 255)).astype(np.uint8)
plt.imshow(image, cmap='gray')
<matplotlib.image.AxesImage at 0x2a0cc9d7eb8>
2.B Save image using JPG format and report compression ratio and RMS error
path = 'images/uniform.jpg'
assert True == cv2.imwrite(path, image)
image_compressed = cv2.imread(path, 0)
print('Compression Ratio: ', (image.shape[0]*image.shape[1]) / os.stat(path).st_size)
print('RMSE: ', rmse(image ,image_compressed))
Compression Ratio: 0.982428839064483
RMSE: 1.94711707355
In this example, JPEG failed and the output has not been compressed at all and the reason is the image with uniform prob means every pixel has equal chance to happen anywhere so in DCT transform, almost all basis functions will have big values. On top of it, Huffman works using probability and compressed more frequent informations, but in uniform, all have same prob so Huffman fails too.
2.C Do step 1 on image where all pixels are 128
image = (np.ones((255, 255))*128).astype(np.uint8)
path = 'images/128.jpg'
assert True == cv2.imwrite(path, image)
image_compressed = cv2.imread(path, 0)
print('Compression Ratio: ', (image.shape[0]*image.shape[1]) / os.stat(path).st_size)
print('RMSE: ', rmse(image ,image_compressed))
Compression Ratio: 59.221311475409834
RMSE: 0.0

This instance has the most possible compression ratio. The reason is that first of all there is only one value which is 128 so the probability of it will be 1 and other values are 0. DCT of this image has only DC value because there is no noise in image and as we know that DC values computed using differences between each 8x8 region, this value is very small too so Huffman needs to only code 1 number and all other values are zero. The error is 0 because retrieving an image with only a DC value has very little loss that can be ignored.
2.D Do step 1 on image where first half is 128 and latter half is 0 (row wise)
image = (np.ones((255, 255))*128).astype(np.uint8)
image[image.shape[0]//2: ,:] = 0
path = 'images/128_0.jpg'
assert True == cv2.imwrite(path, image)
image_compressed = cv2.imread(path, 0)
print('Compression Ratio: ', (image.shape[0]*image.shape[1]) / os.stat(path).st_size)
print('RMSE: ', rmse(image ,image_compressed))
Compression Ratio: 39.31378476420798
RMSE: 0.0

Explanation about huge compression ratio for this image is identical because of the explanation has been provided in the previous example but something that needs to be discussed here is that the ratio is much smaller than image with all same value and the reason is that in this situation, all values of DCT except DC itself are not zero which majority of them are coefficients of the basis functions contributing to vertical changes(first column of DCT is not zero with huge value for some of basis function with same phase or similar to image). Note that the error should not be zero but because it is literally close to zero, the calculations show zero for error because quantization will impact on coefficients.
2.E Do step 1 on image2.bmp
path = 'wiki/image2.bmp'
image = cv2.imread(path, 0)
path = 'images/image2.jpg'
assert True == cv2.imwrite(path, image)
image_compressed = cv2.imread(path, 0)
print('Compression Ratio: ', (image.shape[0]*image.shape[1]) / os.stat(path).st_size)
print('RMSE: ', rmse(image ,image_compressed))
Compression Ratio: 1.9804780756096825
RMSE: 1.70276659073

This is a natural image which means most of DCT basis functions have non-zero coefficients but many of them are small because of low amount of noise in image so we still can get a good compression ratio but obviously not close the previous instances. The error rate must be below than the uniform distributed image because still there are many correlations between adjacent pixels etc in natural images so probability distribution of this image can help Huffman to work much better. Visualizing histogram will indicate us this fact.
2.F Analyze outputs
Explanations are available after each result
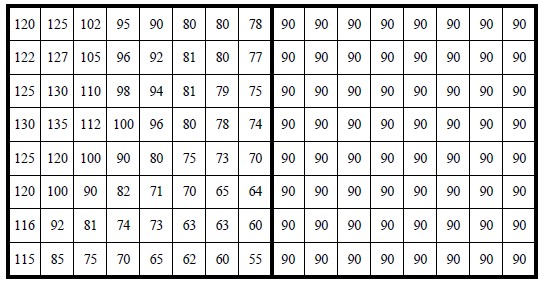
3 Study JPEG coding and then calculate jpg coding for image3.bmp
- Patch
- Shift
- DCT
- Quantization
- Zig-Zag
- Binary
np.set_printoptions(suppress=True)
image = cv2.imread('wiki/image3.bmp', 0).astype(np.float32)
print(image.astype(int))
[[120 125 102 95 90 80 80 78 90 90 90 90 90 90 90 90]
[122 127 105 96 92 81 80 77 90 90 90 90 90 90 90 90]
[125 130 110 98 94 81 79 75 90 90 90 90 90 90 90 90]
[130 135 112 100 96 80 78 74 90 90 90 90 90 90 90 90]
[125 120 100 90 80 75 73 70 90 90 90 90 90 90 90 90]
[120 100 90 82 71 70 65 64 90 90 90 90 90 90 90 90]
[116 92 81 74 73 63 63 60 90 90 90 90 90 90 90 90]
[115 85 75 70 65 62 60 55 90 90 90 90 90 90 90 90]]
3.A Patch
image1 = image[:, :image.shape[1]//2]
image2 = image[:, image.shape[1]//2:]
print(image1)
print(image2)
[[ 120. 125. 102. 95. 90. 80. 80. 78.]
[ 122. 127. 105. 96. 92. 81. 80. 77.]
[ 125. 130. 110. 98. 94. 81. 79. 75.]
[ 130. 135. 112. 100. 96. 80. 78. 74.]
[ 125. 120. 100. 90. 80. 75. 73. 70.]
[ 120. 100. 90. 82. 71. 70. 65. 64.]
[ 116. 92. 81. 74. 73. 63. 63. 60.]
[ 115. 85. 75. 70. 65. 62. 60. 55.]]
[[ 90. 90. 90. 90. 90. 90. 90. 90.]
[ 90. 90. 90. 90. 90. 90. 90. 90.]
[ 90. 90. 90. 90. 90. 90. 90. 90.]
[ 90. 90. 90. 90. 90. 90. 90. 90.]
[ 90. 90. 90. 90. 90. 90. 90. 90.]
[ 90. 90. 90. 90. 90. 90. 90. 90.]
[ 90. 90. 90. 90. 90. 90. 90. 90.]
[ 90. 90. 90. 90. 90. 90. 90. 90.]]
3.B Shift
k = 8
image1 = image1 - 2**(k-1)
image2 = image2 - 2**(k-1)
print(image1)
print(image2)
[[ -8. -3. -26. -33. -38. -48. -48. -50.]
[ -6. -1. -23. -32. -36. -47. -48. -51.]
[ -3. 2. -18. -30. -34. -47. -49. -53.]
[ 2. 7. -16. -28. -32. -48. -50. -54.]
[ -3. -8. -28. -38. -48. -53. -55. -58.]
[ -8. -28. -38. -46. -57. -58. -63. -64.]
[-12. -36. -47. -54. -55. -65. -65. -68.]
[-13. -43. -53. -58. -63. -66. -68. -73.]]
[[-38. -38. -38. -38. -38. -38. -38. -38.]
[-38. -38. -38. -38. -38. -38. -38. -38.]
[-38. -38. -38. -38. -38. -38. -38. -38.]
[-38. -38. -38. -38. -38. -38. -38. -38.]
[-38. -38. -38. -38. -38. -38. -38. -38.]
[-38. -38. -38. -38. -38. -38. -38. -38.]
[-38. -38. -38. -38. -38. -38. -38. -38.]
[-38. -38. -38. -38. -38. -38. -38. -38.]]
3.C DCT
dct1 = cv2.dct(image1)
dct2 = cv2.dct(image2)
print(dct1)
print(dct2)
[[-305.125 141.696579 34.587452 14.095837 4.125 -4.228173
-9.591125 0.754964]
[ 70.202721 4.778924 -9.207951 -13.030813 -11.124005 -14.844501
-12.157721 -2.944922]
[ -33.078762 -13.394925 2.911613 6.277874 5.356743 4.534147
2.274049 1.45818 ]
[ -8.16151 -3.94741 3.605062 -0.925836 0.730066 2.639135
2.547456 -2.924389]
[ 4.875 3.040256 1.341382 -0.09817 -1.375 -0.868863
-2.314507 -1.518153]
[ 5.644981 1.603319 -2.706369 -0.494748 1.565961 -2.743582
-2.083338 3.012747]
[ -3.751903 -0.391161 0.024048 -0.163712 -0.459948 2.595279
3.088388 -1.714436]
[ -2.581657 -1.578806 1.253527 -0.115654 -0.577733 -0.209744
-0.898003 0.390495]]
[[-304. 0. 0. 0. 0. 0. 0. 0.]
[ 0. 0. 0. 0. 0. 0. 0. 0.]
[ 0. 0. 0. 0. 0. 0. 0. 0.]
[ 0. 0. 0. 0. 0. 0. 0. 0.]
[ 0. 0. 0. 0. 0. 0. 0. 0.]
[ 0. 0. 0. 0. 0. 0. 0. 0.]
[ 0. 0. 0. 0. 0. 0. 0. 0.]
[ 0. 0. 0. 0. 0. 0. 0. 0.]]
3.D Quantization
z = np.array([
[16, 11, 10, 16, 24, 40, 51, 61],
[12, 12, 14, 19, 26, 58, 60, 55],
[14, 13, 16, 24, 40, 57, 69, 56],
[14, 17, 22, 29, 51, 87, 80, 62],
[18, 22, 37, 56, 68, 109, 103, 77],
[24, 35, 55, 64, 81, 104, 113, 92],
[49, 64, 78, 87, 103, 121, 120, 101],
[72, 92, 95, 98, 112, 100, 103, 99],
])
quantized1 = np.round(dct1/z)
quantized2 = np.round(dct2/z)
print(quantized1)
print(quantized2)
[[-19. 13. 3. 1. 0. -0. -0. 0.]
[ 6. 0. -1. -1. -0. -0. -0. -0.]
[ -2. -1. 0. 0. 0. 0. 0. 0.]
[ -1. -0. 0. -0. 0. 0. 0. -0.]
[ 0. 0. 0. -0. -0. -0. -0. -0.]
[ 0. 0. -0. -0. 0. -0. -0. 0.]
[ -0. -0. 0. -0. -0. 0. 0. -0.]
[ -0. -0. 0. -0. -0. -0. -0. 0.]]
[[-19. 0. 0. 0. 0. 0. 0. 0.]
[ 0. 0. 0. 0. 0. 0. 0. 0.]
[ 0. 0. 0. 0. 0. 0. 0. 0.]
[ 0. 0. 0. 0. 0. 0. 0. 0.]
[ 0. 0. 0. 0. 0. 0. 0. 0.]
[ 0. 0. 0. 0. 0. 0. 0. 0.]
[ 0. 0. 0. 0. 0. 0. 0. 0.]
[ 0. 0. 0. 0. 0. 0. 0. 0.]]
3.E Zig-Zag (by ghallak)
def zigzag_points(rows, cols):
# constants for directions
UP, DOWN, RIGHT, LEFT, UP_RIGHT, DOWN_LEFT = range(6)
# move the point in different directions
def move(direction, point):
return {
UP: lambda point: (point[0] - 1, point[1]),
DOWN: lambda point: (point[0] + 1, point[1]),
LEFT: lambda point: (point[0], point[1] - 1),
RIGHT: lambda point: (point[0], point[1] + 1),
UP_RIGHT: lambda point: move(UP, move(RIGHT, point)),
DOWN_LEFT: lambda point: move(DOWN, move(LEFT, point))
}[direction](point)
# return true if point is inside the block bounds
def inbounds(point):
return 0 <= point[0] < rows and 0 <= point[1] < cols
# start in the top-left cell
point = (0, 0)
# True when moving up-right, False when moving down-left
move_up = True
for i in range(rows * cols):
yield point
if move_up:
if inbounds(move(UP_RIGHT, point)):
point = move(UP_RIGHT, point)
else:
move_up = False
if inbounds(move(RIGHT, point)):
point = move(RIGHT, point)
else:
point = move(DOWN, point)
else:
if inbounds(move(DOWN_LEFT, point)):
point = move(DOWN_LEFT, point)
else:
move_up = True
if inbounds(move(DOWN, point)):
point = move(DOWN, point)
else:
point = move(RIGHT, point)
zigzag1 = np.array([quantized1[point] for point in zigzag_points(*quantized1.shape)])
zigzag2 = np.array([quantized2[point] for point in zigzag_points(*quantized2.shape)])
print(zigzag1)
print(zigzag2)
[-19. 13. 6. -2. 0. 3. 1. -1. -1. -1. 0. -0. 0. -1. 0.
-0. -0. 0. 0. 0. 0. -0. 0. 0. -0. 0. -0. -0. 0. -0.
0. 0. -0. -0. -0. -0. -0. 0. -0. -0. 0. 0. -0. 0. 0.
-0. 0. -0. 0. -0. -0. -0. -0. -0. -0. -0. 0. -0. -0. 0.
0. -0. -0. 0.]
[-19. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.
0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.
0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.
0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.
0. 0. 0. 0.]
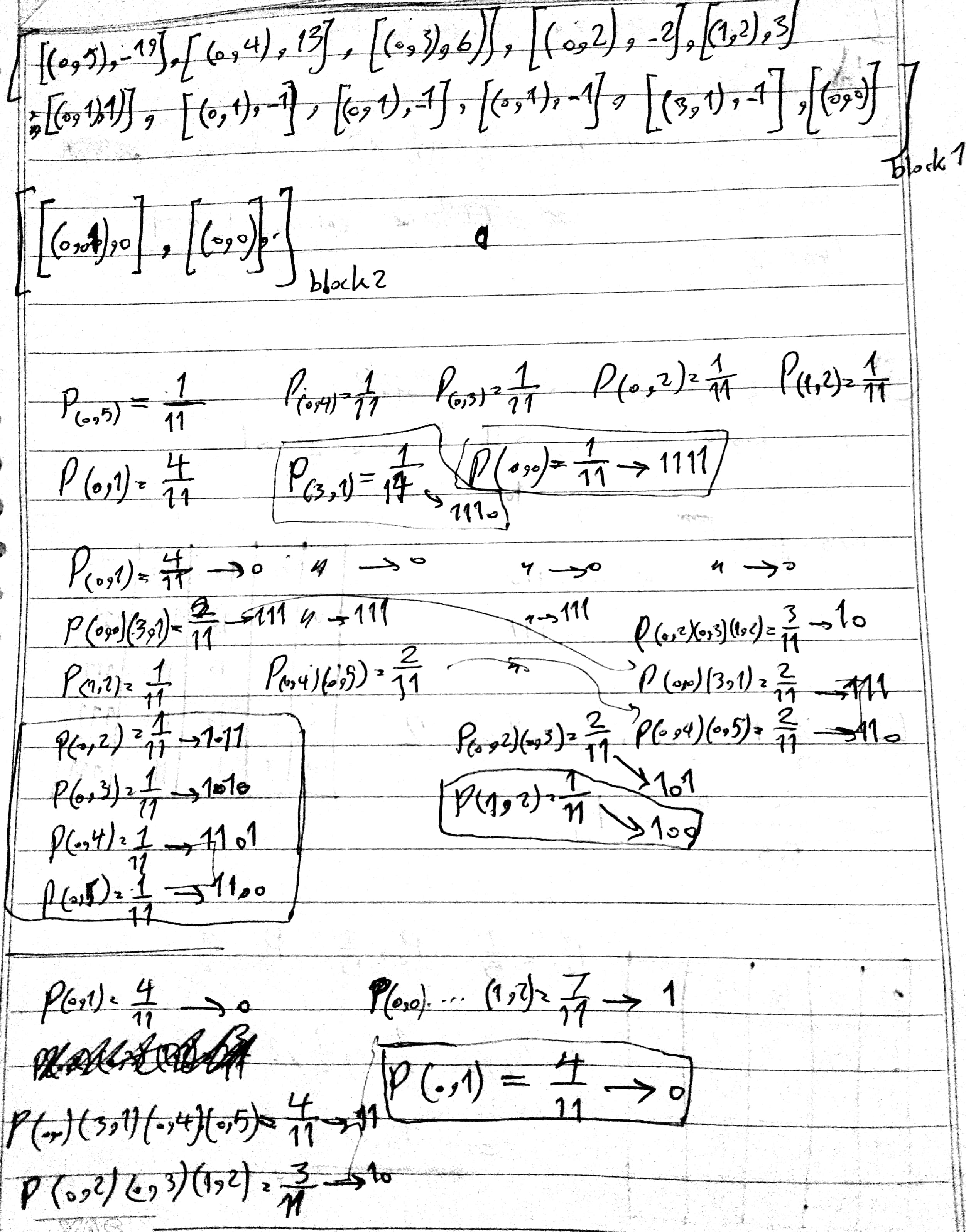
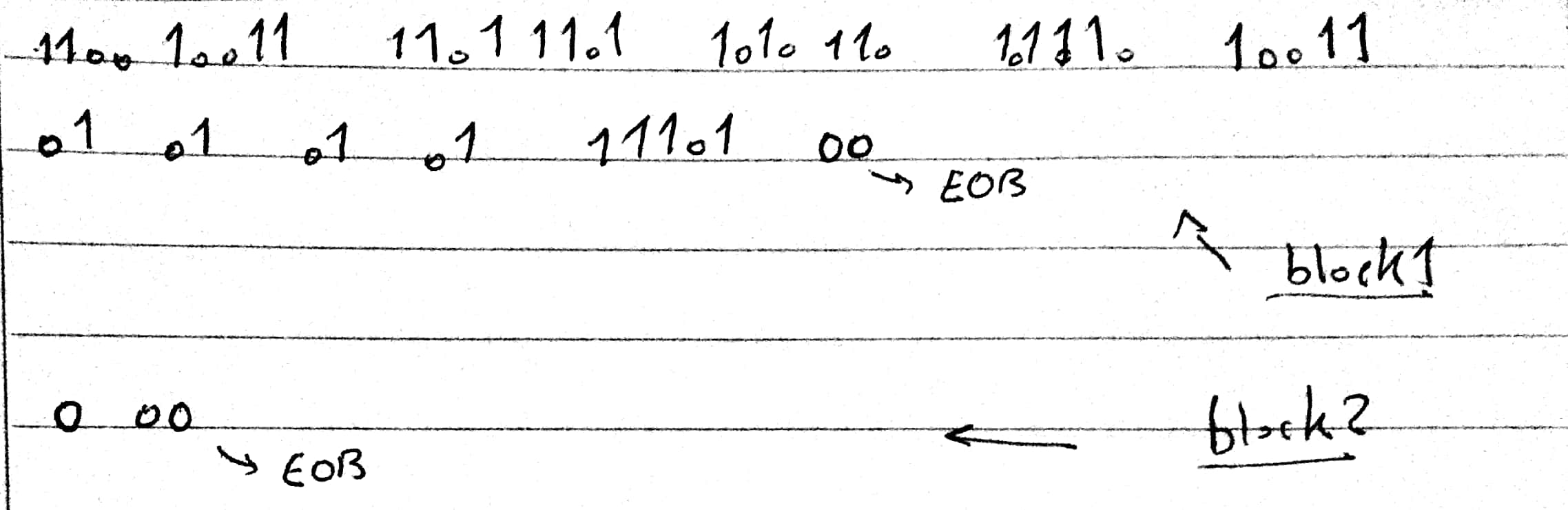
3.F Binary Coding
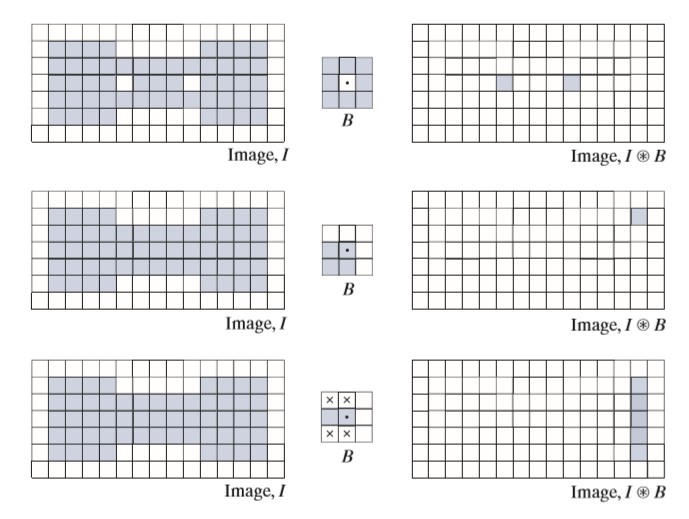
4 Summarize Multiresolution segmentation algorithm
First of all it is a bottom-up approach which means it first starts from pixel-level objects then expand it w.r.t a local scale parameter. (There is a global scale parameter too) to bigger objects surrounded by neighbor pixels.
Let’s define a seed pixel then we look around it (8-connected) to find the best fitting pixel. When the best one found, we check it is common or not; if it is then merge this too and find other best fitting, if not, go and find another best fitting w.r.t to new found node.
For instance, let’s say we are on a then best fitting is b. a and b are common so we merge them as one object ab. On the other hand, if they are not common, then we change seed from a to b (b is the best fitting of a) and now we look for best fitting for b and let’s say it is c. We change seed to c and do the things all over again. (Note that every single object only can be seen once)
There are some parameters like shape, color, etc that can effect of merging directly. The reason is major effect is handled by the definition of best fitting object (neighbor) where aforementioned parameters have impact on this measurement directly. But the most important one is scale parameter.
Scale parameter controls the variance of the diversity of the pixels within merged object. In precise manner, if we increase this parameters more neighbors will be considered as ‘common’ and merged so the size of the segmented object will be increased and vice versa. (usually can be found using validation idea procedure) A simple example would be if you set scale parameter small in a image of airport, airplanes, even people can be segmented but if you set a really high value for this parameter, then only airplanes and band of airport will be segmented and almost all small stuff will be discarded.
But how do we say two neighbor are ‘common’ (homogeneous)? 4 different situation can happen:
- Fulfill criterion
- Fulfill criterion w.r.t to scale parameter
- Fulfill the criterion bidirectionally (both neighbors choose each other as best)
- Scene-wise merging when two big objects fulfill criterion
Here degree of fitting has been defined to find the similarity of two object within n-dimensional feature space:
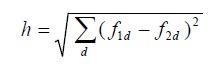
or standardized versions.
Now when we merge two objects(any level) then the homogeneity of shapes will decrease and of course heterogeneity will increase. So the optimization focus on merging most common objects while minimizing this increase in disparateness. Here is the difference of heterogeneity after merge happens:
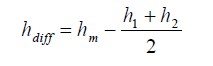
It is also possible to take into account the size of objects or weighting.
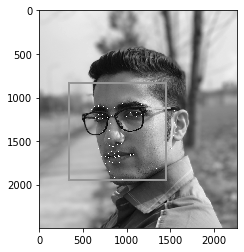 Face Detection, Face Landmarks and dlib
Face Detection, Face Landmarks and dlib